Figura 1 | Figura 2. Cartucho fusible diazed | Figura 3. Cartucho fusible NH | Figura 4. Cartucho fusible cilíndrico industrial
Introducción
En la nota anterior (Ingeniería Eléctrica 316, diciembre de 2016) se han visto las distintas formas de controlar un motor eléctrico monofásico (MEM). Es notorio que aquellas están íntimamente relacionadas con la protección de estos. En lo que sigue, se analiza cada una de las posibilidades de protección para este tipo de motor.
Protección
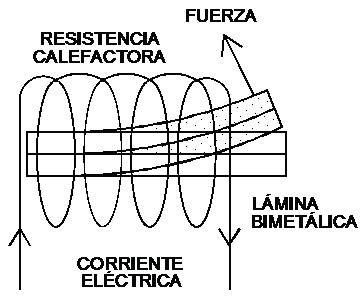
Con los MEM se dan dos situaciones de funcionamiento. La primera: los más pequeños forman parte de los equipos electrodomésticos. En ese caso, para protegerlos, lo más común es colocarles sensores para detectar la temperatura (tipo bimetálicos) que alcanzan los bobinados durante el funcionamiento; ella se elevará en caso de sobrecarga y en determinado momento los desconectará. De producirse un cortocircuito, será la protección del circuito de la instalación eléctrica al cual están conectados quien actúe.
La segunda situación se da en el caso de motores de mayor potencia que se encuentran acoplados a determinados equipos (bombas, compresores, etcétera).
Elementos de protección
Figura 5. Interruptor bipolar tipo PIA | Figura 6. Relé de protección electromecánico | Figura 7. Relé de protección electrónico
Los distintos elementos de protección más comunes que se pueden emplear son los que se describirán a continuación. Señalamos que estos se han visto incorporados en los circuitos de control y que se han mostrado en las figuras 1 a 6 de la nota anterior.
-
Fusible. Se pueden emplear tres tipos: diazed, NH y cilíndricos industriales. Estos últimos tienen la ventaja de que su base también oficia de seccionador.
-
Interruptor automático termomagnético. Conocidos también como PIA (pequeño interruptor automático). Se deben emplear los bipolares (figura 5).
-
Relé de protección por sobrecarga. Existen dos tipos constructivos: electromecánicos (figura 6) y electrónicos (figura 7). Es la protección clásica de todos los motores eléctricos y se asocia a algún tipo de elemento de maniobra como muestran los esquemas de las figuras 7 a 9 de la nota anterior.
-
 
-
Figura 8. Guardamotor | Figura 10. Guardamotor asociado a un MEM
-
Guardamotor termomagnético. Es un interruptor automático termomagnético diseñado para cumplir las funciones de protección contra cortocircuito y sobrecarga de los motores eléctricos. El aspecto de uno de ellos se muestra en la 8.
-
Guardamotor magnético. Es un interruptor automático para realizar la protección contra cortocircuitos solamente. Exteriormente, presenta la misma forma que el descripto anteriormente. Se lo emplea asociado a un relé de protección contra sobrecarga como el descripto en el ítem anterior.
Nota: estos dos últimos dispositivos se pueden asociar a un elemento de maniobra como puede ser un contactor para realizar maniobras de conexión y desconexión del motor eléctrico (figura 10).
Actuación de las protecciones
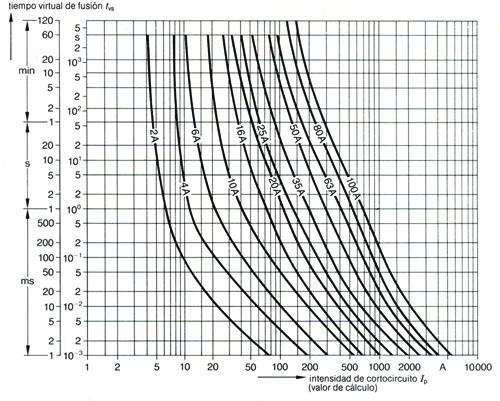 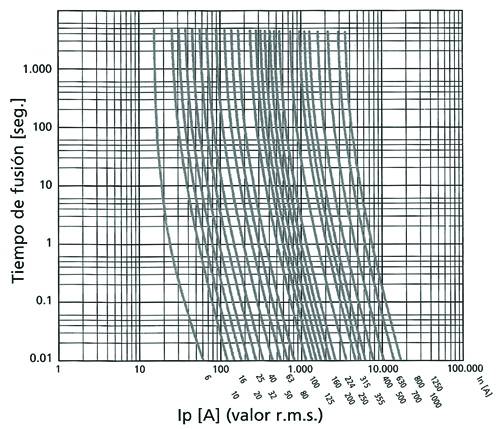  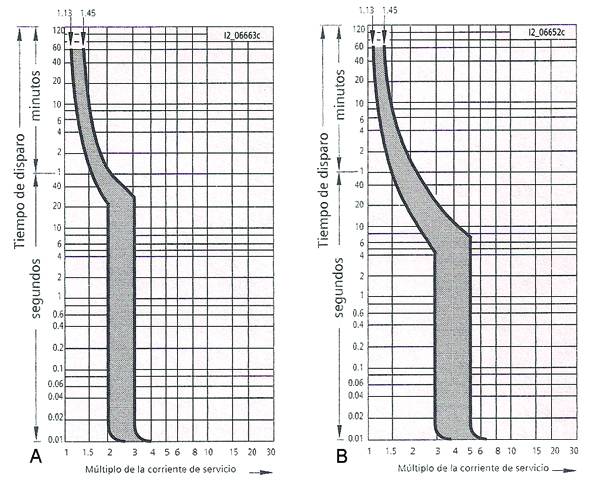
Figura 11. Curvas correspondientes a los fusibles tipo diazed | Figura 12. Curvas correspondientes a los fusibles tipo NH | Figura 13. Curvas correspondientes a los fusibles cilíndricos industriales | Figura 14. Curvas características de los PIA
Las actuaciones de todos los elementos destinados a la protección de los circuitos eléctricos se ven reflejadas en las curvas de respuesta. Estas muestran en forma gráfica la respuesta que tendrá el elemento de protección frente a las magnitudes que está controlando en relación al tiempo (por ejemplo, corriente eléctrica vs. tiempo).
Estas curvas se representan en un plano formado por dos ejes perpendiculares: a uno se asigna la magnitud de la corriente eléctrica (A) a una determinada tensión, y al otro, el tiempo (t). Por convención, estos ejes se dibujan en escala logarítmica para que las curvas sean de más fácil comprensión y utilización.
En lo que sigue, se mostrarán las curvas correspondientes a cada uno de los elementos de protección mostrados hasta aquí.
De la observación de las curvas características de los PIA, se pueden apreciar las distintas respuestas en tiempo y corriente eléctrica de cada una de ellas (A, B, C y D). En la tabla 1 se muestran las posibles aplicaciones de cada una de estas curvas.
Mecánica de la actuación de las protecciones
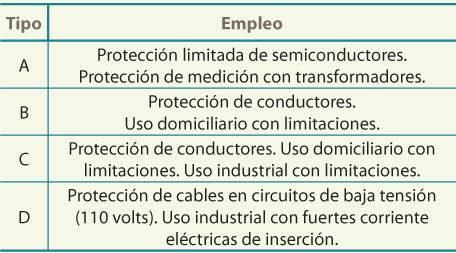
Tabla 1. Características y usos de las curvas de protección
A los fines de explicar el funcionamiento de los tipos de protecciones, recurriremos a un PIA y luego, a la aplicación específica de un motor eléctrico.
En la figura 17 se muestran las curvas de respuestas genéricas de un interruptor automático tipo PIA. En ellas se puede apreciar que están compuesta a su vez por dos tipos de curvas, indicadas con 0-1 y 0-2 respectivamente, las que se intersectan en el punto cero.
La primera de ellas (1) representa la respuesta de la protección por sobrecarga, y la segunda (2), por cortocircuitos; ambas, combinadas, ofrecen una protección completa frente a estas dos anomalías que pueden presentarse en los distintos tipos de circuitos eléctricos. Estas curvas son proporcionadas por los fabricantes, a través de los catálogos técnicos.
Existen elementos de protección que realizan estas funciones en forma separada, como es el caso de los guardamotores magnéticos y los relés de sobrecarga.
Volviendo a la anterior, todos los valores que se encuentran dentro de la zona de protección, que se muestra sombreada en la figura 17, corresponden a los estados en los cuales la protección actúa, desconectando el circuito eléctrico que se encuentra protegiendo.
Si se establece en el circuito una corriente eléctrica de valor I1, la protección actuará en el tiempo indicado con t1, o sea que ha transcurrido t1 segundos desde que se estableció. De igual manera, si la corriente eléctrica establecida fuese I2, la protección actuaría en el tiempo t2; en cambio si la corriente eléctrica fuese I3, la protección no actuará.
La corriente eléctrica indicada con IL es la intensidad límite, valor crítico que cuando se sobrepasa, hace actuar el mecanismo de protección en un tiempo finito.
Protección de los motores eléctricos
  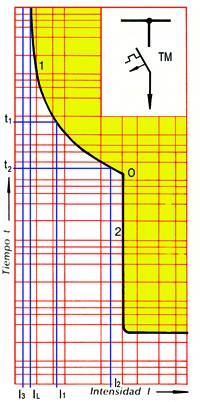
Figura 15. Curva generic de un relé de protección de sobrecargas | Figura 16. Curva de protección de un guardamotor electromagnético | Figura 17. Curvas de las protecciones de un PIA
Los motores eléctricos requieren dos tipos básicos de protecciones: por cortocircuito (que puede ocurrir en sus bobinados o en los cables de su alimentación) y por sobrecarga. Se pueden completar con otras como: subtensión, sobretensión y puesta a tierra. Para hacer estas últimas protecciones se necesitan ciertos relés o dispositivos especialmente diseñados; para hacer las dos primeras de las protecciones mencionadas, se necesitan, para el caso de cortocircuito, fusibles y guardamotores magnéticos, y para el caso de las sobrecargas, relés de sobrecarga y guardamotores termomagnéticos, los cuales pueden estar relacionados con los elementos de maniobra como los contactores.
Estas relaciones entre los distintos elementos de maniobra y protección se visualizan en los denominados esquemas funcionales, los cuales se diseñan de acuerdo a la forma en que ha de trabajar el motor eléctrico y de su potencia.
La utilización de los distintos tipos de aparatos de maniobras (contactores, interruptores, interruptores automáticos, etcétera) y de protección disponibles (fusibles, guardamotores, relés automáticos, etcétera) permite la realización de diversos esquemas de comando y control para el funcionamiento, como se ejemplificó en la nota anterior.
Para la determinación de los parámetros eléctricos de la protección de los motores hace falta conocer: corriente nominal o asignada, corriente de arranque, tiempo de arranque y características del equipo impulsado. Al respecto de estos parámetros, de los dos últimos se puede decir: que el tiempo de arranque es extremadamente breve e imposible de determinar en forma simple; y en cuanto a las características del equipo impulsado, solo se puede apreciar a simple vista si el motor eléctrico lo hace rápidamente o no.
Protección contra cortocircuitos
Se emplean fusibles o guardamotores magnéticos. En el caso de los primeros, son especialmente construidos y son del tipo aM. La corriente eléctrica nominal de estos fusibles puede tomarse para los motores eléctricos con rotor en cortocircuito como: 2,0 x IN. En donde IN es la corriente nominal o asignada. El guardamotor que es solamente magnético cumple la misma función que los fusibles, y se usa la misma forma de elegir el calibre.
Protección contra sobrecarga
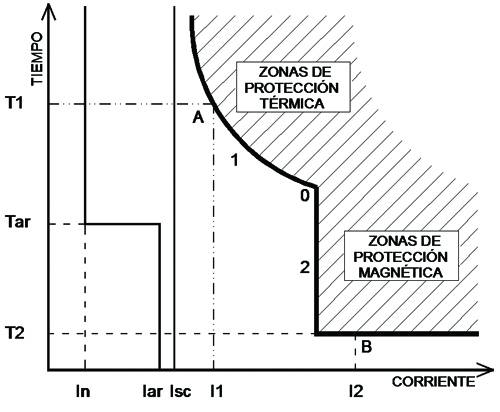
Figura 18. Esquema de la actuación de las protecciones
Se puede realizar mediante el empleo de guardamotores termomagnéticos o bien con relés de sobrecarga, los cuales se pueden acoplar a los contactores o bien a un guardamotor magnético. En los ítems anteriores se han graficado las curvas que representan la actuación general de estos. En la figura 18 se muestra: la evolución de la corriente eléctrica de arranque (Iar) en el tiempo (Tar), una posible corriente eléctrica de sobrecarga admisible (Isc) en forma permanente (5 al 10%), la acción combinada de los relés de protección por sobrecarga (térmica) (1-0) y por cortocircuito (magnética) (0-2) y la acción combinada de ambas protecciones (zona sombreada).
Las acciones combinadas de estas protecciones que se pueden dar:
cuando la corriente eléctrica de funcionamiento (I1) sobrepase la línea que representa la de posible sobrecarga (Isc) e intercepte la curva de la protección térmica (0-1) en el punto A, en cuyo caso el relé dará la señal de apertura al contactor, abriendo el circuito en un tiempo t1;
si se produjese un cortocircuito, la corriente eléctrica (I2) tomaría un valor mucho más alto que la de sobrecarga, tal que la línea que la representa intercepte a la curva de la protección magnética (0-2) en el punto B, con lo cual también dará la correspondiente señal de apertura al contactor haciéndolo desconectar el ME en el tiempo t2.
Cuando se hace arrancar un ME, este toma una corriente arranque (Iar) que aproximadamente dé seis y medio a siete veces la nominal, durante el tiempo de arranque (Tar); en consecuencia, la regulación de los relés de protección debe ser tal que las curvas representativas de estas corrientes de arranque (Iar) no intercepten a las de las protecciones (1-0-2).
Esta es la razón por la cual se emplean las protecciones combinadas, denominadas “termomagnéticas” y más específicamente cuando se trata de MEM los guardamotores termomagnéticos, como los mostrados.
La parte de la protección magnética actúa en caso de cortocircuito, mientras que la parte térmica (bimetálica) acciona en caso de una sobrecarga poco pronunciada pero de larga duración, en cambio insensible a una elevación pasajera de la corriente eléctrica.
Para seguir ampliando conocimientos...
Alberto Luis Farina es ingeniero electricista especializado en ingeniería destinada al empleo de la energía eléctrica y profesor universitario. De la mano de la Librería y Editorial Alsina, ha publicado libros sobre los temas de su especialidad:
Instalaciones eléctricas de viviendas, locales y oficinas
Introducción a las instalaciones eléctricas de los inmuebles Cables y conductores eléctricos
Seguridad e higiene, riesgos eléctricos, iluminación
Riesgo eléctrico
Nota del editor: la quinta y última parte de esta serie de notas se publicará en la próxima edición de “Suplemento instaladores”, Ingeniería Eléctrica 321, junio 2017.
|


