 Manipulación de carga | Packaging | Robot articulado Los robots de servicio están en alza. Durante los últimos años, el mundo ha sido testigo del incremento de los robots de servicio para uso doméstico y personal, también para la industria. De acuerdo a los datos de IFR, la venta de robots de servicio profesional creció un 85 por ciento en 2017 respecto de 2016. Manipulación de carga | Packaging | Robot articulado Los robots de servicio están en alza. Durante los últimos años, el mundo ha sido testigo del incremento de los robots de servicio para uso doméstico y personal, también para la industria. De acuerdo a los datos de IFR, la venta de robots de servicio profesional creció un 85 por ciento en 2017 respecto de 2016.
Definición de robots de servicio
En un esfuerzo conjunto que comenzó en 1995 entre la Comisión Económica de las Naciones Unidas para Europa (UNECE) y la Federación Internacional de Robótica (IFR), se llevó a cabo una definición preliminar y esquema de clasificación de robot de servicio, el cual fue considerado por el comité técnico ISO a cargo del tema. El resultado final fue la norma ISO 8373, la cual rige desde 2012. A continuación, un extracto preliminar de las definiciones más relevantes
-
Un robot es un mecanismo actuador programable de dos o más ejes con cierto grado de autonomía, que se mueve en un entorno para llevar adelante tareas intencionadas. En este contexto, “autonomía” significa la capacidad de llevar adelante tareas intencionadas en base a la sensación y estado actuales, sin la intervención humana.
-
Un robot de servicio es un robot que realiza tareas útiles para equipos o para humanos, sin incluir las aplicaciones de automación industrial. Nota: la clasificación de un robot como “industrial” o “de servicio” se hace de acuerdo a la aplicación para la cual fue diseñado.
-
Un robot de servicio personal o robot de servicio para uso personal es un robot utilizado para tareas no comerciales, en general para personas postradas. Los ejemplos incluyen robots-sirvientes domésticos, sillas de ruedas automáticas, robot asistente de movilidad y robots de ejercicios para mascotas.
-
Un robot de servicio profesional o robot de servicio para uso profesional es un robot de servicio utilizado para tareas comerciales, generalmente operado por un operador entrenado. Los ejemplos incluyen robots de limpieza para lugares públicos, robots de delivery en oficinas u hospitales, robots bomberos, robots de rehabilitación y robots de cirugía en los hospitales. En este contexto, un operador es una persona asignada para arrancar, monitorear y detener la operación de un robot o de un sistema robótico.
-
Un sistema robótico es un sistema compuesto por robot/s, efector/es final/es y cualquier otra maquinaria, equipamiento, dispositivos o sensores que ayuden al robot a realizar su tarea.
Nótese lo siguiente: de acuerdo a la definición, se requiere “un cierto grado de autonomía” para los robots de servicio, ya sea autonomía parcial (incluyendo interacción robot-humano) hasta autonomía completa (sin intervención humana activa). Por lo tanto, además de los sistemas totalmente autónomos, se incluyen sistemas que quizá también estén basados en cierto grado de interacción robot-humano o incluso teleoperación completa. En este contexto, la “interacción robot-humano” significa los intercambios de acciones e información entre humanos y robots para realizar una tarea a través de una interfaz.
Con esta definición, los robots industriales manipuladores (que pueden ser móviles o estar fijos en un lugar) también podrían ser considerados como robots de servicio, siempre y cuando estén instalados en operaciones no manufactureras. Los robots de servicio pueden estar o no equipados con una estructura de brazo, como es el caso de algunos robots industriales. A menudo, pero no siempre, los robots de servicio son móviles.
En algunos casos, los robots de servicio consisten en una plataforma móvil sobre la cual se adhieren uno o varios brazos móviles, y se controlan del mismo modo que los brazos de un robot industrial.
Más todavía, al contrario de su contraparte industrial, los robots de servicio no deben ser totalmente automáticos o autónomos. En muchos casos, estas máquinas pueden incluso requerir un usuario humano o ser teleoperadas.
Debido a la multitud de sus formas o estructuras, así como a las áreas de aplicación, los robots de servicio no son fáciles de definir.
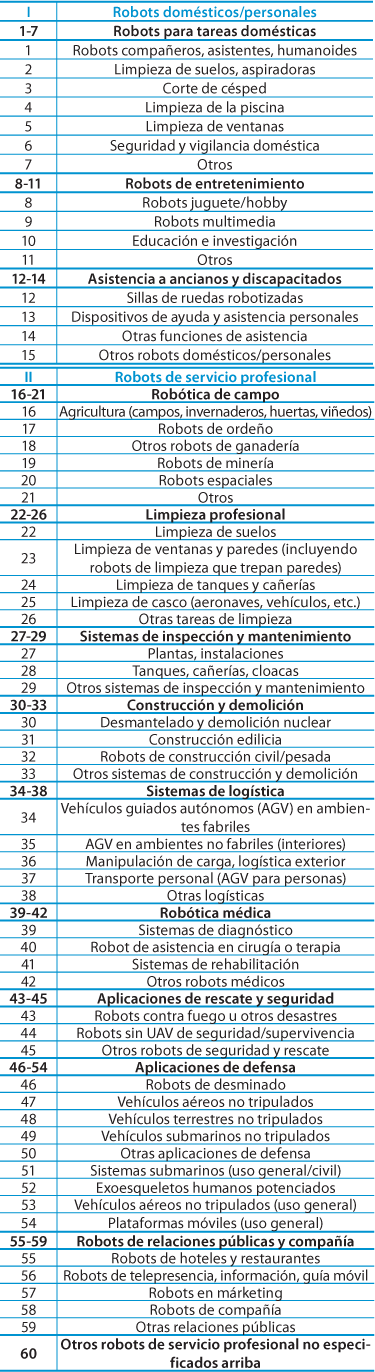
Clasificación de robots de servicio por áreas de aplicación
Desde mediados de la década de 1990, UNECE e IFR han adoptado un sistema preliminar para clasificar robots de servicio por categorías y tipos de interacción, lo que con el correr del tiempo ha resultado en el esquema de clasificación actual. Tanto para robots domésticos/personales como para los robots de servicio profesionales, la clasificación de robots de servicio de acuerdo a los tipos y áreas de aplicación se muestra en la tabla.
 |
 |
|
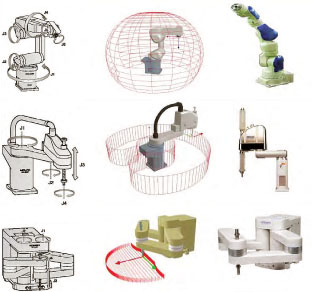
Robots articulados | Robot SCARA (del inglés a Selective Compliant Assembly Robot Arm o Selective Compliant Articulated Robot Arm) es un robot de cuatro grados de libertad con posicionamiento horizontal |
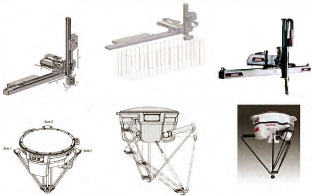
Ropots cartesianos | Robots delta |
|


