
Implementación de un Rapid Control Prototyping (RCP, ‘prototipado rápido de control’) para la identificación de plantas y sintonización automática de controladores utilizando el método del relé asimétrico.
Este trabajo aborda dos ejes temáticos principales. El primero se centra en una serie de experimentos utilizando un método de identificación y control de procesos con aplicación industrial. Se propone un sintonizador automático basado en el método del relé asimétrico, el cual proporciona una estimación de los parámetros típicos de una planta del tipo FOTD (‘primer orden con retardo’, por sus siglas en inglés), y luego, mediante la clasificación del proceso según su retardo normalizado, se ajustan los parámetros de un controlador PID por IMC (‘control por modelo interno’).
El segundo eje se centra en la implementación de un banco de ensayos versátil y de bajo costo para ejecutar simulaciones de tiempo real en donde se realizan las validaciones del método propuesto. Para ello, se utilizan placas Arduino DUE que resultan altamente compatibles con Matlab trabajando en tiempo real, que tienen implementados distintos modelos de plantas.
El segundo eje se centra en la implementación de un banco de ensayos versátil y de bajo costo para ejecutar simulaciones de tiempo real en donde se realizan las validaciones del método propuesto. Para ello, se utilizan placas Arduino DUE que resultan altamente compatibles con Matlab trabajando en tiempo real, que tienen implementados distintos modelos de plantas.
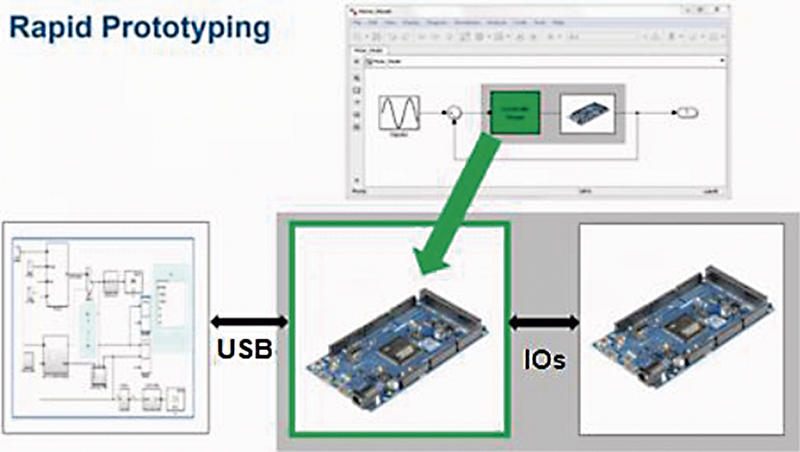 Figura 1. Esquema genérico del RCP que se quiere implementar
Figura 1. Esquema genérico del RCP que se quiere implementar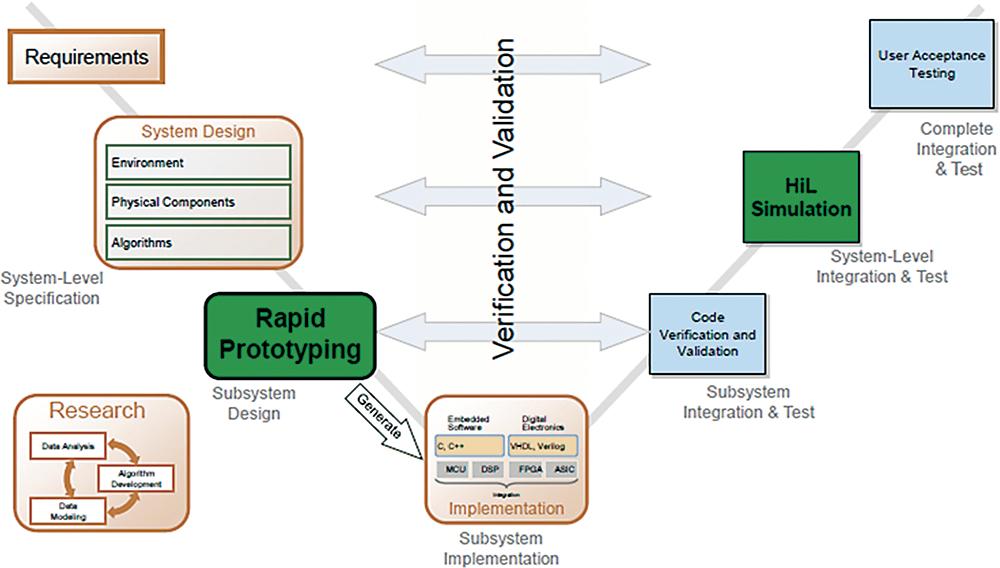 Figura 2. Ciclo de diseño en ‘V’
Figura 2. Ciclo de diseño en ‘V’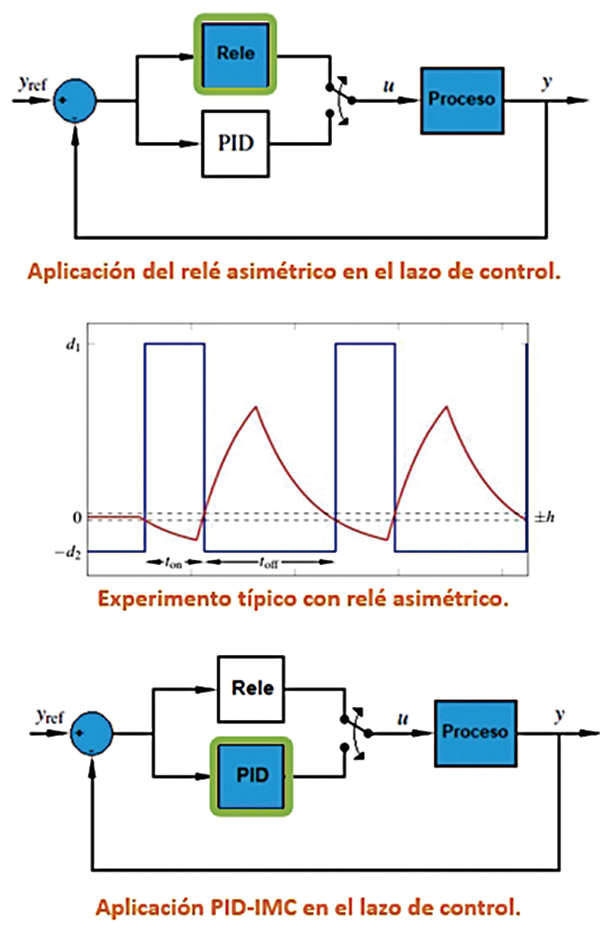 Figura 3. Experimento típico con relé asimétrico
Figura 3. Experimento típico con relé asimétrico
Se destaca la importancia de las simulaciones en tiempo real y se enfoca en simulaciones del tipo Rapid Control Prototyping
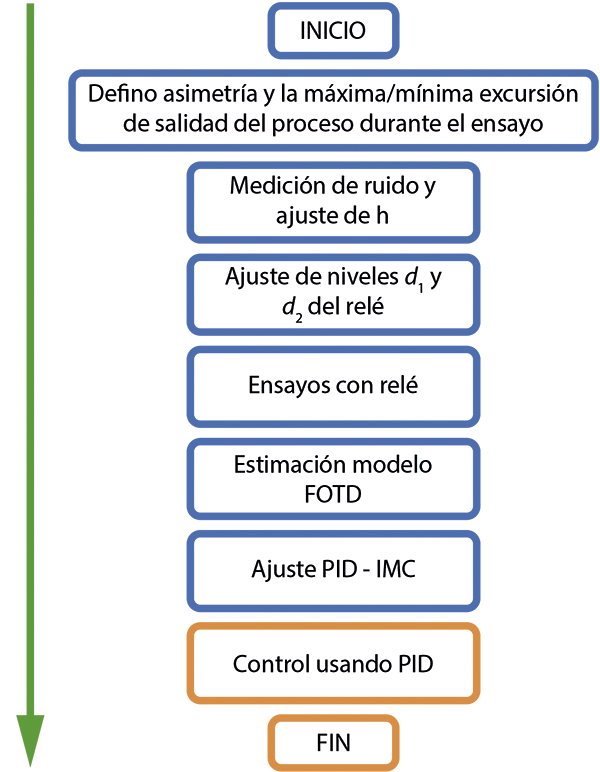 Figura 4. Esquema secuencial de los pasos realizados durante el ensayo completo
Figura 4. Esquema secuencial de los pasos realizados durante el ensayo completo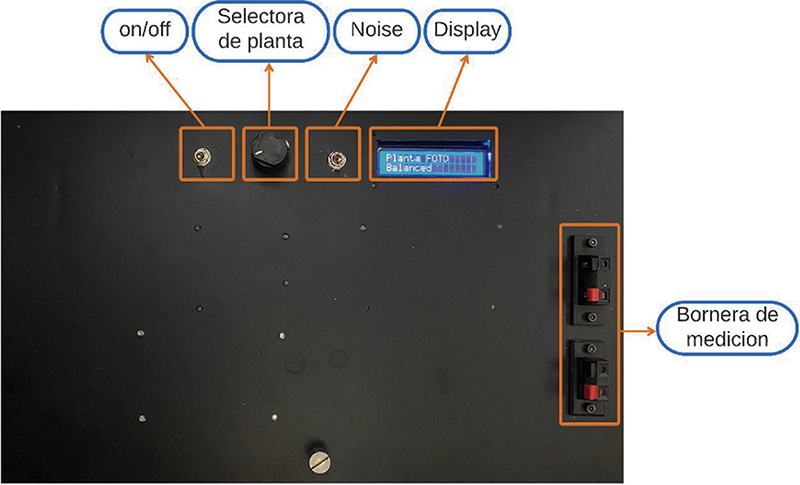 Figura 5. a) Vista superior del banco de ensayos. Interfaz con el usuario
Figura 5. a) Vista superior del banco de ensayos. Interfaz con el usuario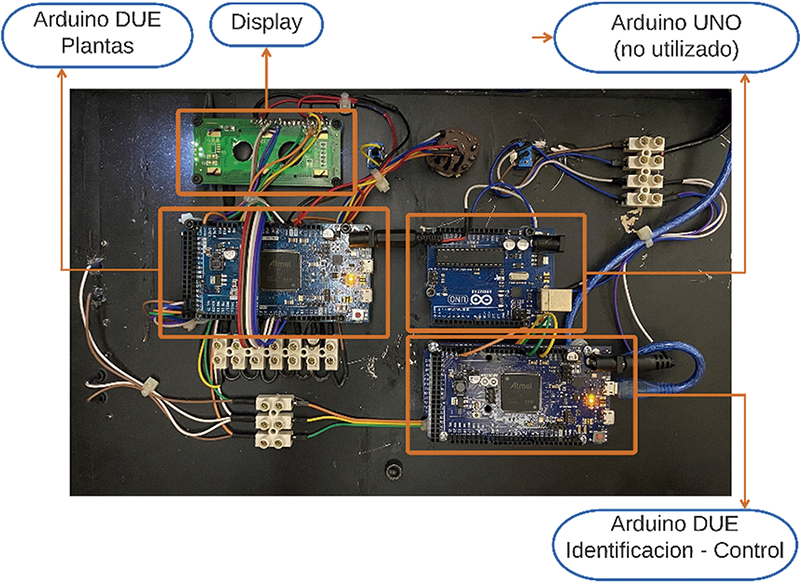 Figura 5. b) vista interior del banco de ensayos
Figura 5. b) vista interior del banco de ensayos
Se destaca la importancia de las simulaciones en tiempo real y se enfoca en simulaciones del tipo Rapid Control Prototyping (RCP, ‘prototipado rápido de control’) conectando una planta física (placa Arduino DUE con seis dinámicas embebidas y seleccionables por el usuario) a una segunda placa (controlador virtual que posee el algoritmo compilado y embebido de identificación por relé asimétrico y control PID-IMC), vinculadas ambas a través de las E/S.
Utilizar este desarrollo en plantas reales solo requiere reemplazar la placa Arduino que emula las plantas utilizando las E/S de la segunda placa que conecta al controlador virtual. Por último, Simulink está ejecutándose en tiempo real y en External Mode en una PC para monitoreo y control de parámetros. La figura 1 es una representación de lo dicho.
Utilizar este desarrollo en plantas reales solo requiere reemplazar la placa Arduino que emula las plantas utilizando las E/S de la segunda placa que conecta al controlador virtual. Por último, Simulink está ejecutándose en tiempo real y en External Mode en una PC para monitoreo y control de parámetros. La figura 1 es una representación de lo dicho.
Simulaciones RCP
La simulación en tiempo real (RTS) reproduce la complejidad del sistema físico en tiempo real, a la vez que conserva las ventajas de una simulación: flexibilidad, rápida puesta en práctica, fácil depuración y amplia cobertura de las pruebas. En la simulación del tipo RCP, se conecta una planta física real a un controlador cuyo algoritmo se ejecuta en un ambiente de desarrollo que permite su ejecución en tiempo real, concluyendo en un controlador virtual. Esta técnica ofrece, entre otras ventajas, mayor flexibilidad y rapidez en la construcción y sintonización del prototipo del controlador. Este tipo de simulaciones es parte del ciclo de diseño en ‘V’, representado en la figura 2.
Modelos de plantas para ensayar
Se implementan seis tipos de procesos que serán sometidos a diferentes ensayos: tres de ellos son del tipo FOTD puros y, además, se pueden clasificar, según el valor del retardo normalizado, como “balanceado”, “con retardo dominante” o “con constante de tiempo dominante”. Los tres procesos restantes son los propuestos por Berner, Åström y Hägglund en Towards a New Generation of Relay Autotuners [IFAC, Elsevier]. Estas plantas no son del tipo FOTD puras, pero si se aplica el algoritmo de identificación del relé asimétrico, es posible evaluar su desempeño comparando los FOTD estimados con la correspondiente aproximación por curva de reacción. Todos estos procesos deben ser modelados en su versión discreta antes de ser embebidos en la placa Arduino DUE que cumplirá el rol de planta.
Métodos de identificación y control implementados
En primer lugar, para la etapa de identificación se utiliza el método del relé asimétrico propuesto por Berner, Åström y Hägglund, que presenta una versión mejorada del método clásico de sintonización automática con relé simétrico. La principal limitación que impone usar el algoritmo clásico del relé simétrico es que solo permite obtener la ganancia y la fase de un punto de frecuencia, por lo que los modelos obtenidos con este método sirven únicamente para algunos de los ajustes de controladores, como Ziegler-Nichols. La excitación asimétrica (figura 3) permite obtener un modelo de primer orden con retardo y, por consiguiente, se pueden utilizar otros ajustes que logren un mejor desempeño en las dinámicas de lazo cerrado.
Con la aplicación del método de sintonización del PID por IMC se obtiene una respuesta en lazo cerrado sobreamortiguada (con tiempo de respuesta ajustable a través de un parámetro a elegir) y, por tanto, resulta más adecuado para muchas plantas cuyo requisito sea que su salida controlada no tenga sobrepico respecto a la referencia. La figura 4 muestra con mayor detalle cada una de las secuencias ejecutadas. Cabe aclarar que el valor de la histéresis del relé se ajustará en función del ruido presente, y ambos niveles del relé se autoajustarán en función de la asimetría deseada y los valores de excursión máxima y mínima de la salida del proceso durante el ensayo, definidas por el usuario.
Con la aplicación del método de sintonización del PID por IMC se obtiene una respuesta en lazo cerrado sobreamortiguada (con tiempo de respuesta ajustable a través de un parámetro a elegir) y, por tanto, resulta más adecuado para muchas plantas cuyo requisito sea que su salida controlada no tenga sobrepico respecto a la referencia. La figura 4 muestra con mayor detalle cada una de las secuencias ejecutadas. Cabe aclarar que el valor de la histéresis del relé se ajustará en función del ruido presente, y ambos niveles del relé se autoajustarán en función de la asimetría deseada y los valores de excursión máxima y mínima de la salida del proceso durante el ensayo, definidas por el usuario.
Con la aplicación del método de sintonización del PID por IMC se obtiene una respuesta en lazo cerrado sobreamortiguada
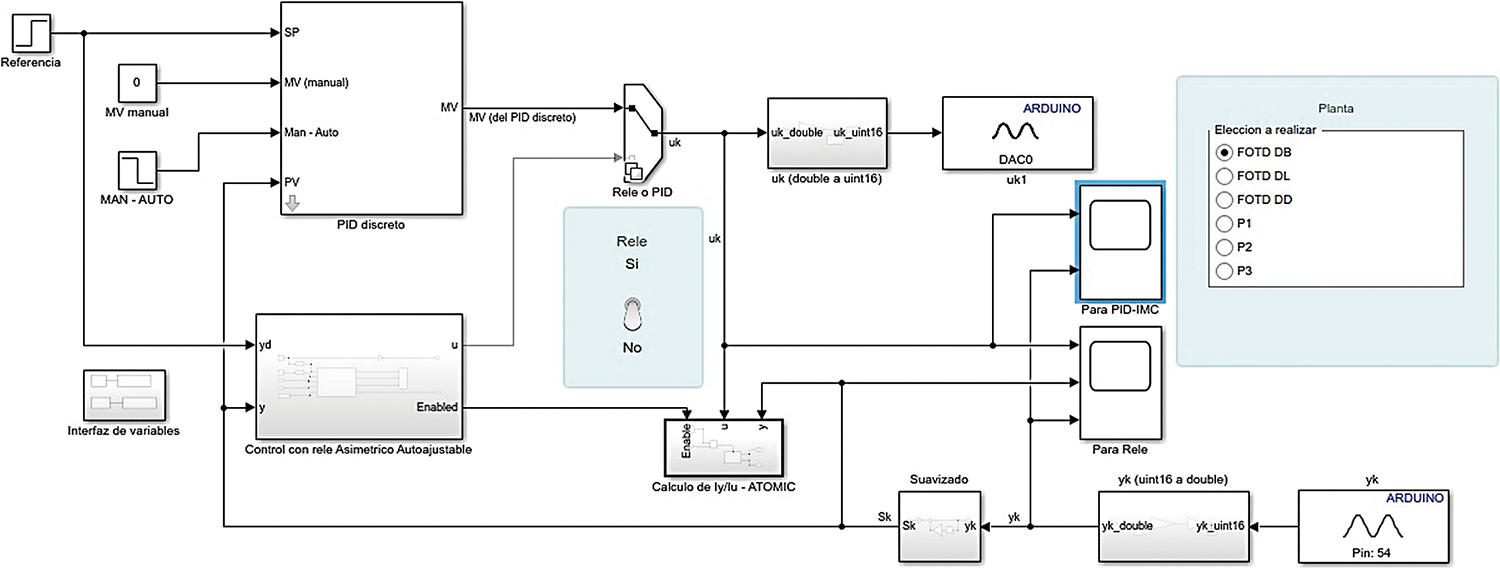 Figura 6. Diagrama en bloques del algoritmo de estimación de parámetros FOTD, sintonización y control del lazo, utilizado para las simulaciones RCP
Figura 6. Diagrama en bloques del algoritmo de estimación de parámetros FOTD, sintonización y control del lazo, utilizado para las simulaciones RCP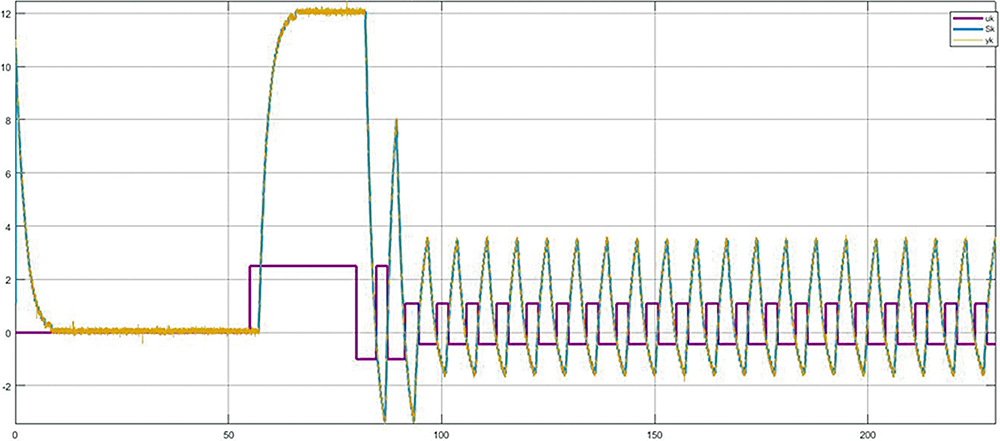 Figura 7. Ensayo a un proceso FOTD balanceado que requiere autoajuste de niveles del relé asimétrico
Figura 7. Ensayo a un proceso FOTD balanceado que requiere autoajuste de niveles del relé asimétrico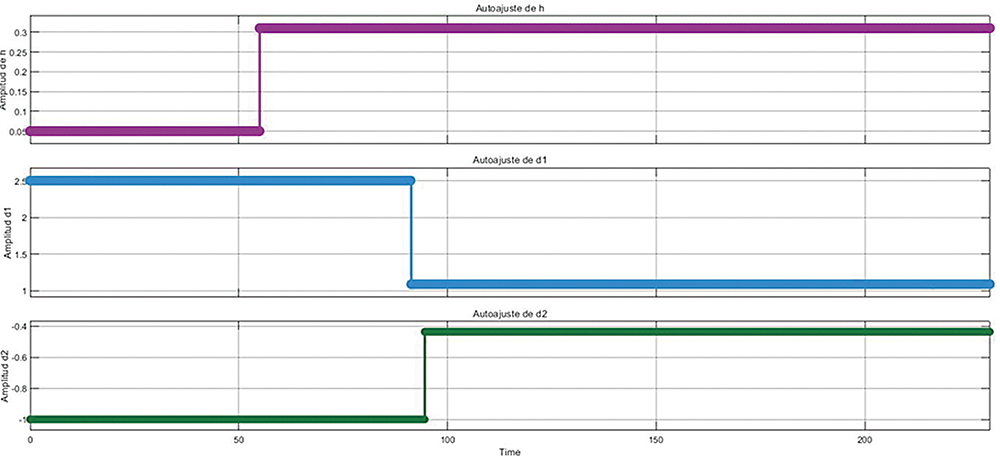 Figura 8. Autoajuste de parámetros del relé asimétrico en el ensayo del proceso FOTD balanceado
Figura 8. Autoajuste de parámetros del relé asimétrico en el ensayo del proceso FOTD balanceado
Implementación del banco de ensayos
Las figuras 5a y 5b muestran la implementación en hardware del banco de ensayos para simulaciones RCP, mientras que la figura 6 muestra la implementación en software, es decir, el diagrama en bloques del algoritmo de estimación de parámetros FOTD, sintonización y control del lazo utilizado.
Finalmente, con el banco de ensayos RCP se ejecutan los experimentos para la identificación de modelos en todos los tipos de plantas posibles, y se obtienen así resultados satisfactorios en los parámetros FOTD estimados y los correspondientes ajustes del PID-IMC del lazo de control. A modo de ejemplo, las figuras 7 a 10.
En la figura 7 puede verse la ejecución de un ensayo completo de identificación de planta con el método del relé asimétrico. A modo de ejemplo, se ha aplicado el algoritmo a una planta de naturaleza FOTD balanceada, para la cual se requiere un autoajuste de los niveles superior e inferior del relé, conservando la asimetría solicitada. En la figura pueden distinguirse: acción de control proveniente del relé asimétrico (color magenta), salida real obtenida de la planta (color amarillo) y salida real de la planta, con aplicación de un filtro para ruido (color cian). Notar que durante los primeros cincuenta segundos, el sistema realiza una medición de ruido presente, para el autoajuste de la histéresis del relé asimétrico.
En la figura 8 puede verse la correspondencia de los autoajustes con lo observado en la figura 7. Durante los primeros cincuenta segundos, se realiza la medición de ruido presente en la señal de salida de la planta ensayada. A partir de allí, se autoajusta el valor de histéresis del relé asimétrico (color magenta). Luego, en régimen se miden las excursiones de la salida de la planta, y en función de los valores programados como deseados, se autoajustarán o no los niveles superior e inferior de la señal de actuación aplicada por el relé hacia la planta (colores celeste y verde) conservando la asimetría deseada.
En la figura 9 puede verificarse que la estimación ha concluido de forma satisfactoria. Los resultados de la figura 10 corroboran que se ha logrado un ajuste correcto del controlador a través de PID-IMC, incluyendo un seguimiento adecuado a las referencias y rechazo de las perturbaciones.
Finalmente, con el banco de ensayos RCP se ejecutan los experimentos para la identificación de modelos en todos los tipos de plantas posibles, y se obtienen así resultados satisfactorios en los parámetros FOTD estimados y los correspondientes ajustes del PID-IMC del lazo de control. A modo de ejemplo, las figuras 7 a 10.
En la figura 7 puede verse la ejecución de un ensayo completo de identificación de planta con el método del relé asimétrico. A modo de ejemplo, se ha aplicado el algoritmo a una planta de naturaleza FOTD balanceada, para la cual se requiere un autoajuste de los niveles superior e inferior del relé, conservando la asimetría solicitada. En la figura pueden distinguirse: acción de control proveniente del relé asimétrico (color magenta), salida real obtenida de la planta (color amarillo) y salida real de la planta, con aplicación de un filtro para ruido (color cian). Notar que durante los primeros cincuenta segundos, el sistema realiza una medición de ruido presente, para el autoajuste de la histéresis del relé asimétrico.
En la figura 8 puede verse la correspondencia de los autoajustes con lo observado en la figura 7. Durante los primeros cincuenta segundos, se realiza la medición de ruido presente en la señal de salida de la planta ensayada. A partir de allí, se autoajusta el valor de histéresis del relé asimétrico (color magenta). Luego, en régimen se miden las excursiones de la salida de la planta, y en función de los valores programados como deseados, se autoajustarán o no los niveles superior e inferior de la señal de actuación aplicada por el relé hacia la planta (colores celeste y verde) conservando la asimetría deseada.
En la figura 9 puede verificarse que la estimación ha concluido de forma satisfactoria. Los resultados de la figura 10 corroboran que se ha logrado un ajuste correcto del controlador a través de PID-IMC, incluyendo un seguimiento adecuado a las referencias y rechazo de las perturbaciones.
Con el banco de ensayos RCP se ejecutan los experimentos para la identificación de modelos en todos los tipos de plantas posibles, y se obtienen así resultados satisfactorios en los parámetros FOTD estimados
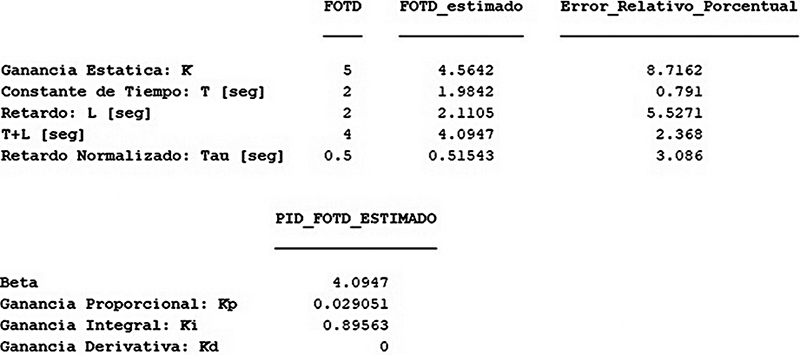 Figura 9. Ejemplo para un sistema FOTD balanceado
Figura 9. Ejemplo para un sistema FOTD balanceado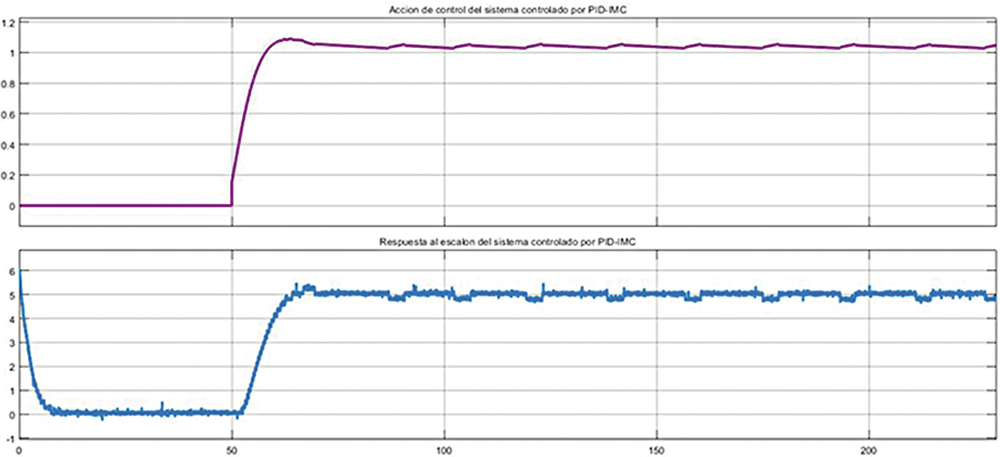 Figura 10. Ejemplo de respuesta al escalón del lazo controlado con PID-IMC ajustado a partir de la estimación.
Figura 10. Ejemplo de respuesta al escalón del lazo controlado con PID-IMC ajustado a partir de la estimación.de un modelo FOTD balanceado
Respuesta al escalón SP = 5 del lazo controlado, utilizando PID-IMC ajustado a partir de la estimación de un modelo FOTD balanceado.
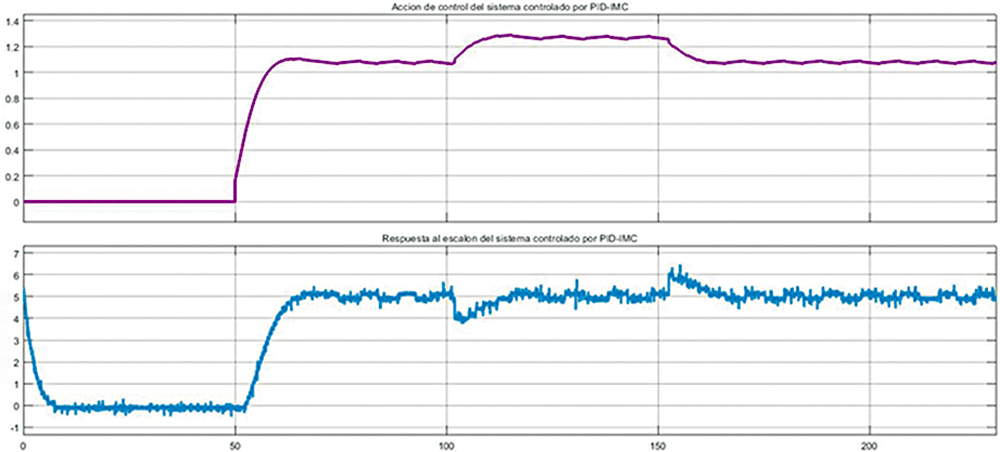 Figura 10. Ejemplo de respuesta al escalón del lazo controlado con PID-IMC ajustado a partir de la estimación.
Figura 10. Ejemplo de respuesta al escalón del lazo controlado con PID-IMC ajustado a partir de la estimación.Respuesta al escalón SP = 5 del lazo controlado, utilizando PID-IMC ajustado a partir de la estimación de un modelo FOTD balanceado. Comportamiento ante la aplicación de una perturbación.
Conclusiones y recomendaciones futuras
Este estudio logra implementar un algoritmo, inicialmente con simulaciones fuera de línea y luego con simulaciones RCP, a fin de obtener ajustes automáticos de parámetros en controladores PID mediante ensayos simples.
Destaca la creciente tendencia de utilizar sintonizaciones automáticas, señalando que muchos lazos podrían operar deficientemente debido al desconocimiento del ajuste correcto. La combinación de simulaciones HIL y RCP ofrece un ambiente de prueba eficiente para industrias y universidades, generando confianza y conocimiento en técnicos.
Se resalta la asequibilidad del hardware Arduino y su capacidad para soportar algoritmos de procesos simples. A la vez, el método del relé asimétrico se destaca como una mejora simple y efectiva.
Los resultados fueron satisfactorios, tanto para las simulaciones fuera de línea como para las simulaciones en tiempo real, aunque se obtienen estimaciones más precisas en las primeras.
Se proponen recomendaciones para optimizar el algoritmo, mejorar la calidad de las señales analógicas y adaptar el banco de ensayos para simulaciones HIL en el futuro. Este enfoque de bajo costo proporciona una herramienta versátil que se podría aplicar en las diferentes etapas de simulaciones de tiempo real en el ciclo de desarrollo en ‘V’.
Destaca la creciente tendencia de utilizar sintonizaciones automáticas, señalando que muchos lazos podrían operar deficientemente debido al desconocimiento del ajuste correcto. La combinación de simulaciones HIL y RCP ofrece un ambiente de prueba eficiente para industrias y universidades, generando confianza y conocimiento en técnicos.
Se resalta la asequibilidad del hardware Arduino y su capacidad para soportar algoritmos de procesos simples. A la vez, el método del relé asimétrico se destaca como una mejora simple y efectiva.
Los resultados fueron satisfactorios, tanto para las simulaciones fuera de línea como para las simulaciones en tiempo real, aunque se obtienen estimaciones más precisas en las primeras.
Se proponen recomendaciones para optimizar el algoritmo, mejorar la calidad de las señales analógicas y adaptar el banco de ensayos para simulaciones HIL en el futuro. Este enfoque de bajo costo proporciona una herramienta versátil que se podría aplicar en las diferentes etapas de simulaciones de tiempo real en el ciclo de desarrollo en ‘V’.
En los siguientes vínculos pueden verse los videos con el desarrollo total del experimento para este proceso:
Estimación de parámetros FOTD y sintonización automática de PID por IMC
Control a lazo cerrado del proceso FOTD (DB)usando PID-IMC parametrizado
Por Ing. Marcelo Bruno, Facultad de Ingeniería, Universidad de Buenos Aires. linkedin.com/in/marcelo-adrian-bruno-931901128
Tutora Dra Ing. Flavia Felicioni. linkedin.com/in/flavia-felicioni
Tutora Dra Ing. Flavia Felicioni. linkedin.com/in/flavia-felicioni
Nota del editor: El presente artículo es el resumen de la tesis con la que el autor se graduó de la “Maestría en Automatización Industrial” de la Escuela de Graduados en Ingeniería Electrónica y Telecomunicaciones de la Facultad de Ingeniería de la Universidad de Buenos Aires, enfocada en la aplicación práctica de las metodologías estudiadas en las clases.
Autor:
Publicado en:
Número:
Mes:
Año: